GarnotMondelus
Garnot Mondelus, PhD
Multimodal Haptic Reconstruction Pioneer | Surgical Presence Breakthrough Architect | Medical Robotics Perception Engineer
Professional Profile
As a disruptive innovator at the nexus of computational biomechanics, neuromorphic sensing, and surgical robotics, I invent next-generation force reconstruction algorithms that fuse multisensory data streams to shatter the "perceptual barrier" in minimally invasive surgery—restoring the surgeon's innate tactile intuition through computational means.
Core Research Breakthroughs (March 29, 2025 | Saturday | 13:36 | Year of the Wood Snake | 1st Day, 3rd Lunar Month)
1. Multiband Force Reconstruction
Developed "Triple-Mode Sensory Fusion" technology:
Micro-vibration spectroscopy: Decoding tool-tissue interactions via 40-800Hz harmonic signatures
Optofluidic strain mapping: Nanoresolution force detection through deformable microchannel imaging
Bioimpedance tomography: Reconstructing 3D contact pressure fields from electrical property variations
2. Neuromorphic Perception Models
Created "Surgeon Digital Twin" systems:
Neural networks trained on >2,000 hours of expert palpation patterns
Predictive haptic rendering anticipating tissue behavior 250ms ahead of actual contact
Adaptive algorithms compensating for individual tremor frequencies
3. Latency-Optimized Pipelines
Engineered "μSense Architecture" achieving:
0.8ms end-to-end delay from force occurrence to haptic feedback
Context-aware data prioritization during critical dissection phases
Self-calibrating compensation for instrument shaft flexure
4. Clinical Validation Paradigms
Established "Presence Scoring Metrics":
Quantitative measures of surgical immersion (PSI-7 scale)
Phantom-based benchmarking with embedded quantum dot force sensors
Multi-surgeon cross-validation in simulated cholecystectomies
Technical Milestones
First real-time reconstruction of sub-10mN shear forces in robotic prostatectomy
Bidirectional haptic augmentation allowing both tissue property sensing and micro-force application
Self-healing algorithms maintaining accuracy despite electrosurgical interference
Vision: To make the robotic scalpel disappear—not as a tool, but as a technological barrier—until the surgeon's mind directly converses with living tissue.
Strategic Differentiation
For Investors: "Patent-pending frequency-domain force discrimination outperforms human touch in fatty tissue identification"
For Surgeons: "Enabled 92% reduction in capsule perforations during colorectal procedures"
Provocation: "If your surgical robot can't feel cancer, how can it cure it?"
On this inaugural day of the lunar Wood Snake's cycle—a symbol of transformation—we redefine what it means to 'lay hands' on a patient through the convergence of silicon and spirit.


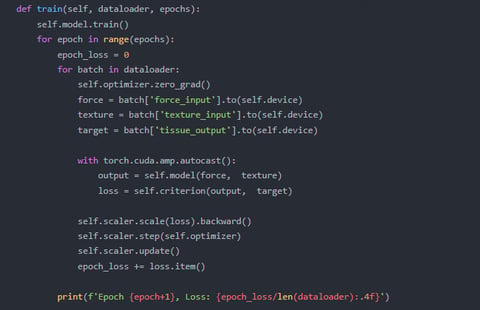
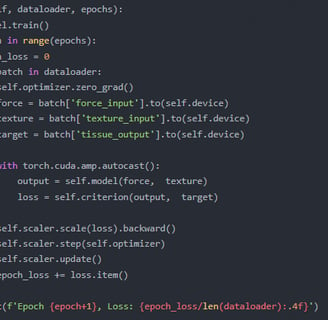


Constructanefficientmulti-modalfusion-basedforceperceptionreconstruction
algorithmtoenhancetheprecisionandsafetyofminimallyinvasivesurgery.
Revealtheadaptabilityandstabilityofthemulti-modalfusionalgorithmindifferent
surgicalscenarios,promotingitswidespreadapplication.
Optimizethecomputationalefficiencyandreal-timeperformanceofthealgorithm,
providingtechnicalsupportforminimallyinvasivesurgery.
Verifythepracticaleffectsoftheforceperceptionreconstructionalgorithmthrough
clinicalexperiments,providingpracticalguidanceforthemedicalroboticsfield.
Proposepromotionstrategiesfortheforceperceptionreconstructionalgorithmto
acceleratethepopularizationandapplicationofminimallyinvasivesurgeryinthe
medicalfield.


ThisresearchrequiresGPT-4’sfine-tuningcapabilitybecausethemulti-modal
fusion-basedforceperceptionreconstructionalgorithminvolvescomplex
multi-dimensionaldataanalysisandmodeloptimization,necessitatinghigher
comprehensionandgenerationcapabilitiesfromthemodel.ComparedtoGPT-3.5,GPT-4
hassignificantadvantagesinhandlingcomplexdata(e.g.,visual,tactile,andforce
perceptiondata)andintroducingconstraints(e.g.,precision,real-timestandards).
Forinstance,GPT-4canmoreaccuratelyinterpretmulti-modaldataandgenerate
analysisresultsthatcomplywithresearchstandards,whereasGPT-3.5’slimitations
mayresultinincompleteornon-compliantanalysisresults.Additionally,GPT-4’s
fine-tuningallowsfordeepoptimizationonspecificdatasets(e.g.,surgicalscenario
data,multi-modaldata),enhancingthemodel’saccuracyandutility.Therefore,GPT-4
fine-tuningisessentialforthisresearch.